삼각함수를 학습하는 이유
언리얼 엔진을 통한 클라이언트 개발 시 물체의 위치,회전,이동(Transform)과 물리 계산등 다양한 계산에 삼각함수에 대한 계산이 필요했습니다.
- 마우스 커서가 가리키는 방향을 바라보게하려면 아크탄젠트를 사용해 각도 계산하기
- 캐릭터나 물체를 특정 궤적을 따라 이동시키기
- 조명, 그림자, 반사효과 등 광원의 세기 등
삼각함수
- 각의 크기를 삼각비로 나타내는 함수
- 동경의 크기에 따라 변화하는 함수
- 직각삼각형에서 각도와 변의 비율을 나타내는 함수
- Sin,Cos,Tan
- 각도를 나타내는 방법
- 도(Degree), 라디안(Radian)
- 주어진 함수에 대한 각을 구하는 함수
- 역함수 (Arcsin, Arccos Arctan)
- 세변과 그에 인접한 각도 간의 관계를 나타내는 법칙.
- 두 점간의 거리를 구할 때
- 코사인법칙

직각삼각형을 통한 정의 Sin, Cos, Tan
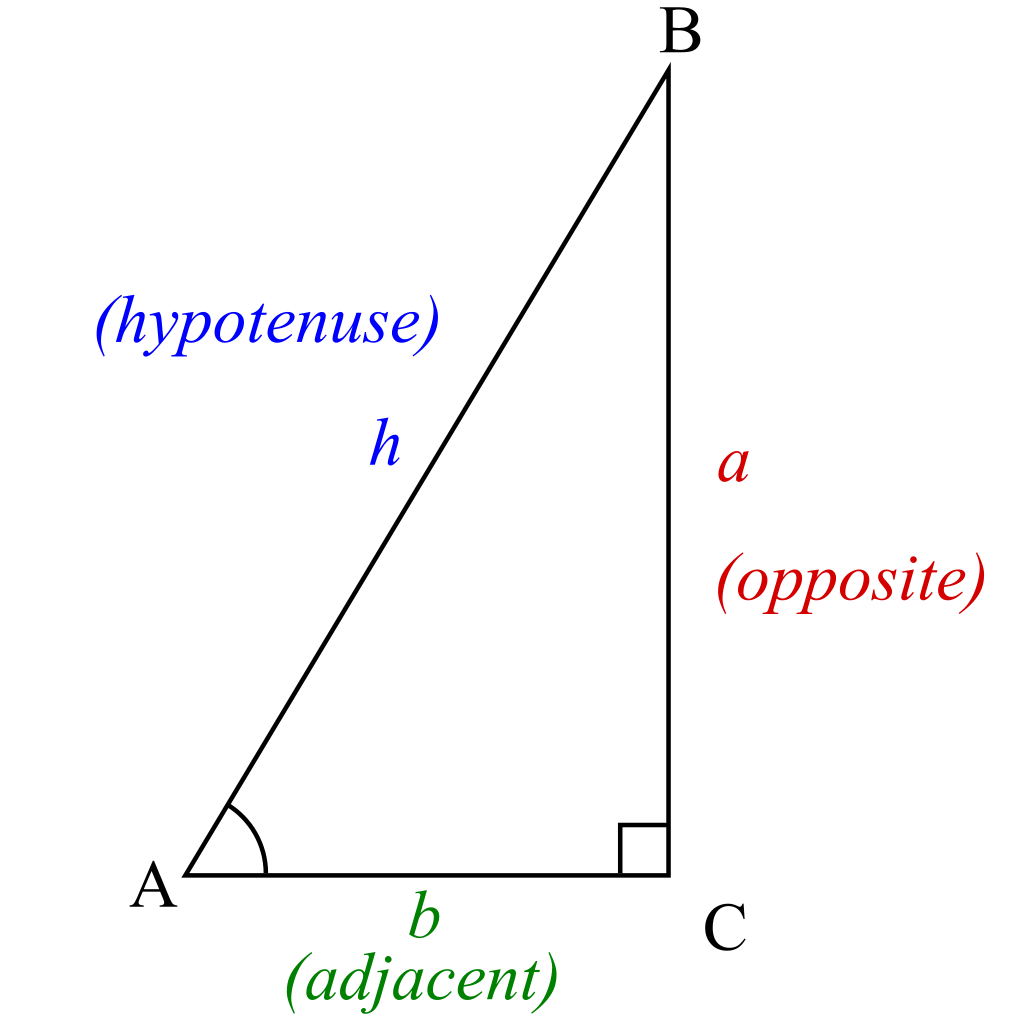
- Sine(Sin)
- 직각삼각형에서 각의 대변과 빗변의 비율
- y축 관련 계산에서 사용된다.
- Sin A = a/h
- Cosine(Cos)
- 직각삼각형에서 각 인접변의 비율
- x축 관련 계산에서 사용된다.
- CosA = b/h
- Tangent(Tan)
- 각의 대변과 인접변의 비율
- 기울기 계산에 사용된다.
- TanA = a/b
코사인 법칙

코사인 제 1법칙
- c = b Cos A + a COS B
- 양 변의 길이와 알고자 하는 변 사이의 두 각의 크기를 아는 경우, 다른 한변의 길이를 알아낼 때 사용할 수 있다.
코사인 제 2법칙
- b^2 = c^2 + a^2 - 2caCosB
- 두 변의 길이와 끼인각의 크기를 알 때 삼각형의 나머지 한 변의 길이를 구할 때 쓸 수 있다.
단위원을 통한 정의 Sin θ , Cos θ , Tan θ
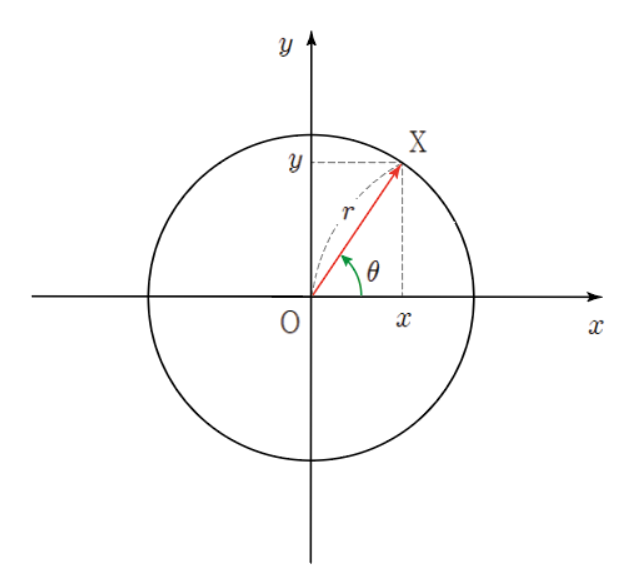
- sin θ = y/r
- cos θ = x/r
- tan θ = y/x = sin θ / cos θ
특수각
- 각 중에서도 0,30,45,60,90도와 같은 각도로 삼각비 값을 계산하거나 기억하기 쉽게 정리되 각도
- 특정한 수치로 계산된다.


호도법 Radian

- 호의 길이로 각도를 표현하는 방법
- 라디안(Radian) : 호도법으로 표현하는 각의 크기
- 각에 대응하는 호의 길이를, 원의 반지름으로 나눈 값
- 호의길이 = 반지름 길이, 360 = PI = 180
- 원 위의 점이 원점을 중심으로 반지름의 길이만큼 한 방향으로 움직였을 때 대응하는 각의 크기 : 1 라디안
삼각함수 항등식
- 삼각함수가 나오는 항등식

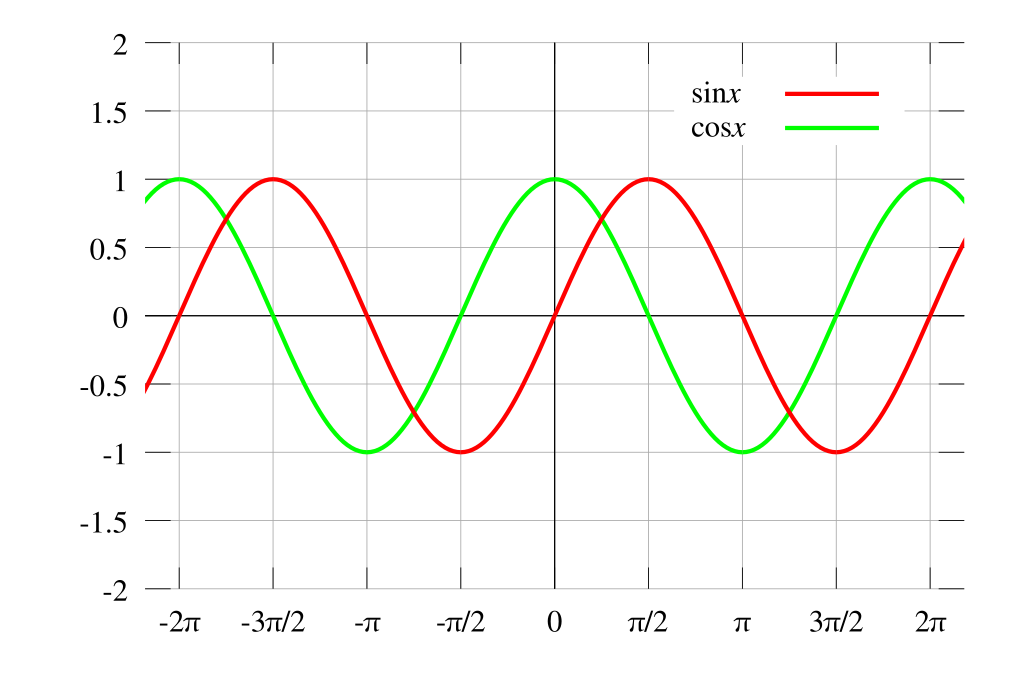
Sin Cos 그래프
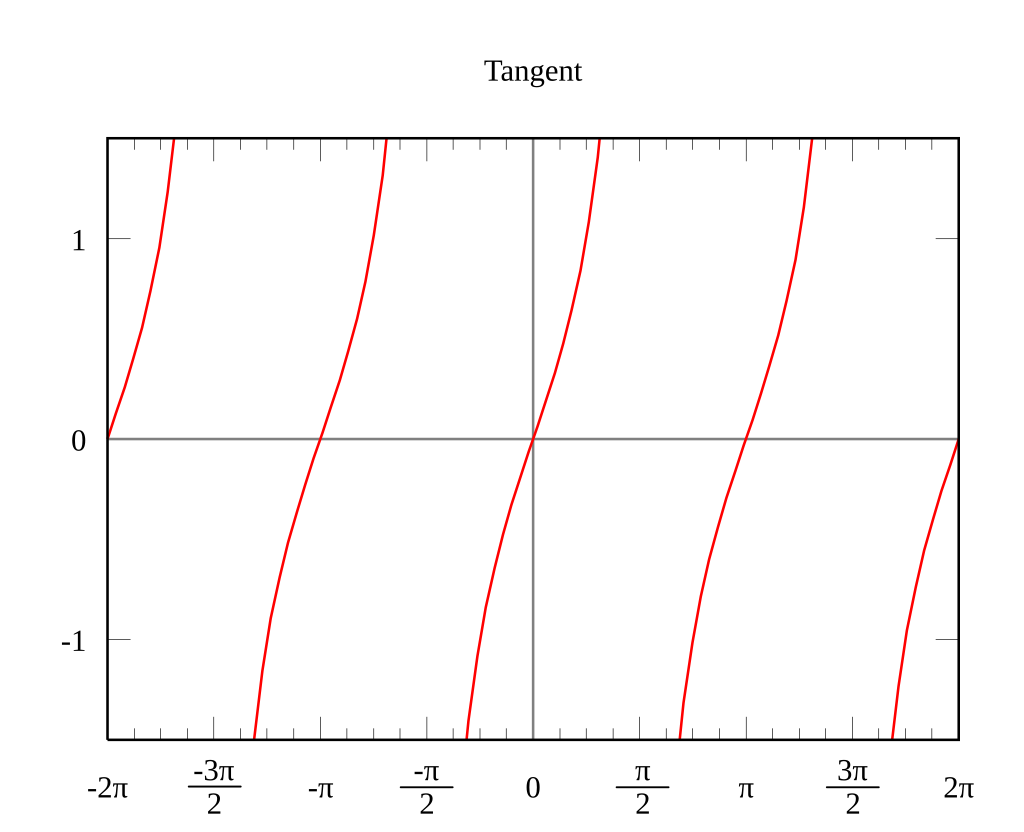
Tan 그래프
사진출처 - https://ko.wikipedia.org/wiki/%EC%82%BC%EA%B0%81_%ED%95%A8%EC%88%98
삼각 함수 - 위키백과, 우리 모두의 백과사전
위키백과, 우리 모두의 백과사전. 원함수는 여기로 연결됩니다. 어떤 함수를 도함수로 하는 함수에 대해서는 부정적분 문서를 참고하십시오. 코사인은 여기로 연결됩니다. 아프리카 남부의 민
ko.wikipedia.org
삼각함수 기본
삼각함수 개념 (Trigonometric Function) 각의 크기를 삼각비로 나타내는 함수 동경의 크기에 따라 변화하는 함수 가장 근본적인 주기 함수 직각 삼각형을 통한 정의 C가 직각인 삼각형 ABC에서, 각 A, B,
note.mmmsk.myds.me
삼각함수-2 :
https://designerd.tistory.com/entry/DirectX12-%EC%82%BC%EA%B0%81%ED%95%A8%EC%88%98
[게임수학] 삼각함수
호도법(Radian 라디안) 각의 크기를 재는 SI 유도 단위이다. 호의 길이로 각도를 나타내는 방법이다. 기호는 rad 또는 c이며 이는 자주 생략된다. 어떤 각의 라디안 값은 같은 크기의 단위원 중심각
designerd.tistory.com
'게임수학' 카테고리의 다른 글
| 게임수학 - Matrix (행렬) (0) | 2025.01.13 |
|---|---|
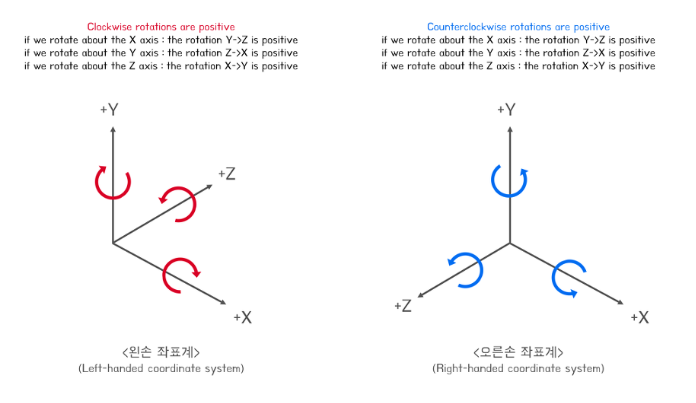
| 게임수학 - 왼손좌표계, 오른손좌표계 (1) | 2025.01.02 |
| 게임수학 - Vector(기하) (0) | 2024.12.31 |